VPLanet Architecture
This guide describes the fundamental feature of VPLanet’s architecture, including its flow chart, data structures, and its framework for model comparison. Afterwards, we present a brief introduction to function pointer arrays.
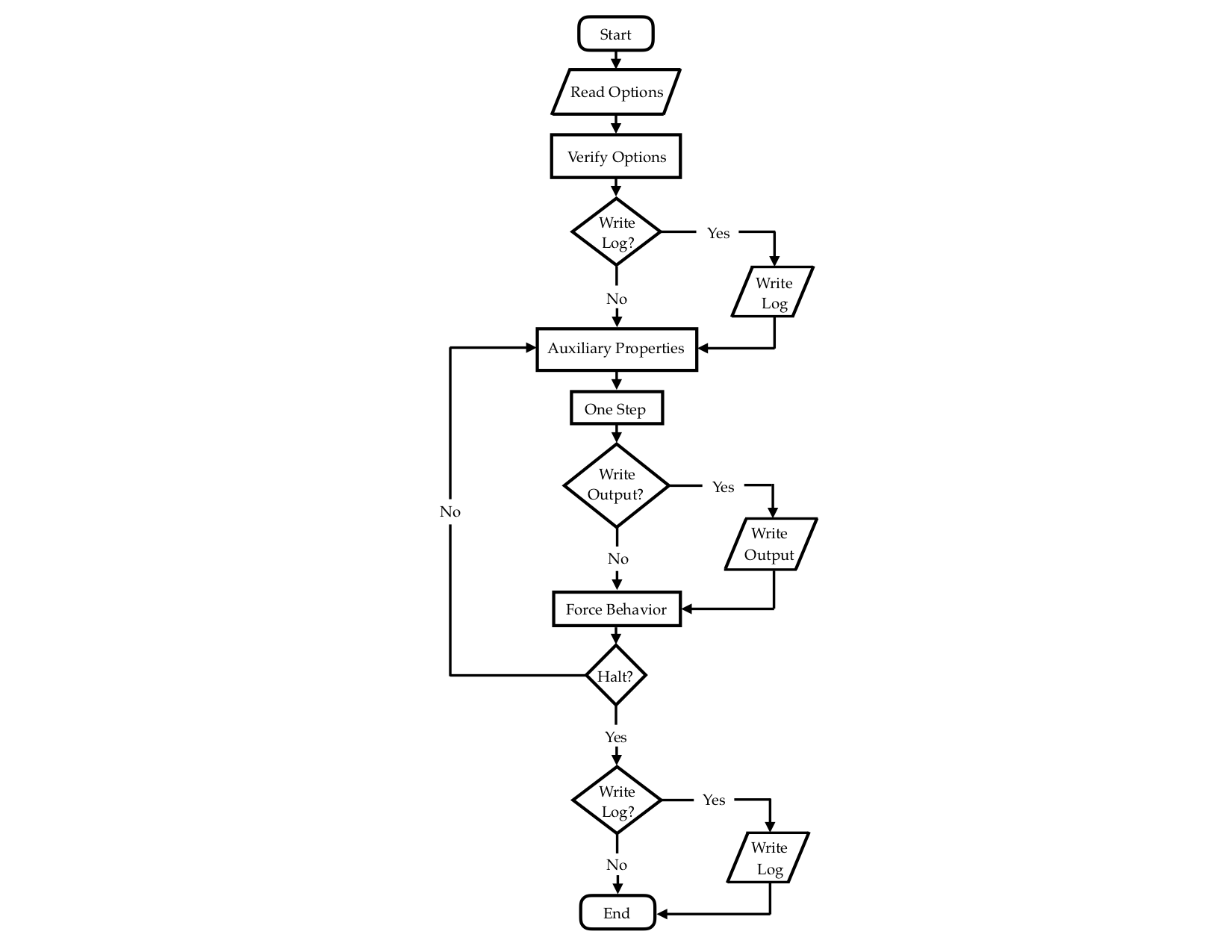
VPLanet’s Flow Chart
VPLanet has been designed to operate in a linear fashion with very few decision points. The key steps are 1) read the input options, 2) verify the options, 3) write the initial conditions to a log file, 4) integrate the system while outputting results, and 5) write the final conditions to the log file. In graphical form, here is the flow chart.
Reading Options
The first step in the code’s execution is to read in the options specified by the user and a function called ReadOptions. These instructions are in ASCII text files and are typically called the “infiles” as the team has traditionally used the extension .in with them. The infiles contain “options” that are described in the modules and options page, as well as with the -h and -H command line flags.
At this stage, numerous simple checks are performed on the input, such as ensuring that arguments to an option are not unphysical, e.g. eccentricities less than 0. Each of these checks must only apply to an individual option. More complicated checks are handled in Verify.
Note
Some arrays and matrices are allocated prior to the ReadOptions call.
Verifying Options
Once all the options have been read in, the data are passed to Verify, which is one of the most complicated aspects of the code. It’s in Verify that the options are checked for self-consistency. For example, if a user inputs mass, radius and density for a body, it’s very unlikely they are all consistent at machine precision. These sorts of quality control issues are handled in Verify. Additionally, it is in Verify that most arrays and matrices, including function pointers, are allocated. The entry point to this process is in verify.c:VerifyOptions.
Because any given verification step is likely unique, there is not a universal standard for verification. As a developer, you must determine how best to confirm that the user has asked for a valid simulation. A primary goal of VPLanet is to provide a user-friendly code that identifies all inconsistent input because its interdisciplinary nature makes it easy for a user to request an unphysical simulation.
That said, many generic problems have already been identified and solution have been implemented. If you are working on a verification step, you should check verify.c and all the module files to see if a solution has been presented. Note that the modules all have subroutines called something like VerifyAtmEsc that performs verification steps that are unique to that module.
Writing to the Log
VPLanet includes functionality to thoroughly document each simulation, and one of the primary methods for this feature is the log file. Writing a log file is optional, but it is highly recommended for both sanity checks, as well as for use with its support scripts. If the user elects to write a log file, it will occur after verification and after the integration (if an integration is requested). In other words the log file provides a snapshot of the initial and final conditions of the simulation.
The log file records the value of each output in system units (SI). While options can be input in a wide range of units, recording the state in system units allows users to determine if they have input something incorrectly, and also helps developers identify bugs.
Note
If a user requests an output with a negative sign, which forces a specific unit, then the value in the log file will not be SI, but the custom units associated with that output.
For example, a log file entry might look like this:
(Age) System Age [sec]: 3.155760e+14
This line provides basic information about a body. In this case it’s the age of the body. The first field, in parentheses, is the output name, i.e. a user could copy and paste that string into the argument list of saOutputOrder and its value at each output time would be included in the output file. The next field is a short description of the output. Next, in brackets, is the units of the output, and finally the actual value of the parameter is listed. The log file breaks all these outputs down by body, module, and initial/final conditions.
System Integration
After verify and possible logging, the code will then begin integrating the system of equations that are required based on the options. The integration is broken down into five steps: Auxiliary Properties (sometimes shortened to AuxProps), One Step, Output, Force Behavior, and Halt.
Note
If the user does not select a forward or backward integration, but does elect to write a log file, then the code will calculate all the initial conditions and write them to the log. This feature can be useful if one just wants to assess the current state of a system.
Auxiliary Properties: Prior to moving the system one step forward, the code calculates “helper” variables that make the code easier to parse. While strictly speaking the code would be faster if these parameters were not calculated separately, the VPLanet team has found that the code is much easier to read and debug with this step. There are not strict rules for what should or should not be an auxiliary property, but given that they are calculated every step, you should be judicious in their use.
One Step: After calculating the auxiliary properties, the code is now ready to take a step forward. Currently two integration schemes have been implemented in VPLanet: Euler and 4th order Runge-Kutta. The former is strongly discouraged and should only be used for testing/educational purposes.
Output: After taking one step, the code then compares the new simulation time to the output interval. If it’s time for an output, the WriteOutput function is called and all outputs are sent to the output file(s), usually designated as .forward or .backward depending on the direction of evolution that was selected.
Force Behavior: Next the code determines if any fundamental change needs to be implemented. For example, if all the water is lost from a planet’s atmosphere, then that value should be set to 0 and the function pointer in fnUpdate should be updated to point to fdTiny, i.e. water loss should no longer occur. The details of this step are unique to each module and there are no strict guidelines here. As with Verify, check the module files for methods that might work for your given problem.
Halt: The final step in the integration is to check for halts, which are conditions that cause the code execution to end. For example, a user may want to stop the code if all the water is lost from a planet. If this occurs, the code will write one more output to the .forward/.backward files at the time the halting condition was triggered. Note that the final conditions will still be written to the log file in the event of a halt.
Data Structures
VPLanet consists of 8 data structures (structs) that contain all the informaton needed to perform a simulation: Control, Body, System, Update, Module, Files, Options, and Output. Additionally, it uses 3 function pointer arrays/matrices: fnReadOption, fnWriteOutput, and fnUpdate.
Control
The Control struct contains all the variables related to how the code runs. Some of these variable are housed inside 4 additional structs: Halt, Io, Evolve, and Units. Many of the variables in the main Control struct are function pointer arrays that enable individual modules to control the execution.
Halt: This struct contains information on all the halting conditions.
Io: This struct contains the variables on how VPLanet prints to the screen and to files.
Evolve: This struct contains the data related to how VPLanet integrates a system, including function pointer vectors for BodyCopy.
Units: Information on the units, both input and output, for all bodies and files.
Body
The Body struct contains all the physical and orbital variables associated with each body in a system. It is initialized as an array with a length equal to the number of object in the system, i.e. the number of arguments to saBodyFiles. This struct is very large and is not broken down into substructs, but if you add a new member to the struct, please include it in the block of text associated with the module, or, if a multi-module property, add it to the general block. No variables associated with integration, I/O, or multi-body properties should be part of the Body struct.
System
The System struct contains data relevant to multi-body properties, typically parameters associated with orbital dynamics. As with the Body struct, no variables associated with integration or I/O should be included, and single body properties should be put in the Body struct.
Update
The Update struct contains the variables related to how each primary variable is advanced during an integration. This includes the size of the function pointer matrix (fnUpdate), the variable associated with each element of that matrix, and the instantaneous derivatives of each primary variable as a function of time.
Module
This struct contains information related to how the modules interact for a given body. Most of the member of this struct are function pointer matrices, with some variable for keeping track of which modules are applied to which body.
Files
The Files struct contains the relevant data for input and output files, which are divided into structs called Infile and Outfile. These two structs contain information about file names and output parameters. The one exception is that the line number in an input file associated with a give option is recorded in the Options struct.
Options
This struct contains all the data that describe the options, such as its name default value, associated module(s), etc. Note that the function that reads the option is not included (because it must take the Options struct as an argument).
Output
The Output struct is analogous to Options, except for output. Note that the parameters for the output files, e.g. the .forward files, are stored in Files.Outfile.
fnReadOption, fnWriteOutput, and fnUpdate
fnReadOption and fnWriteOutput are function pointer vectors that contain the
list of functions for reading in options and writing outputs, respectively.
fnUpdate is the matrix of function pointers for the derivatives. It is the core
of VPLanet and is the feature that allows the dynamic assembly of the modules.
Framework for Model Comparison
VPlanet is designed so that certain model assumptions can be grouped
together, similar to a macro. Depending on the “model” selected for a given
module physical and/or orbital parameters of the body will behave differently.
For example, EqTide module, which computes planetary tides, includes the
option “sTideModel” with options CPL and CTL, two competing models. With
VPlanet, the user can design experiments that test the assumptions of
the two tidal models, which are qualitatively different, while holding
everything constant. Note that not all modules have models.
Function Pointers
As VPLanet relies heavily on vectors and matrices of function pointers, but they are not commonly used in scientific software, we provide a brief introduction to them here. A function pointer is a variable that contains the memory address of a function. For example, consider the following C code that shows how to use a scalar function pointer:
1#include <stdio.h>
2
3typedef double (*fnptr)(double,double);
4
5double foo(double a, double b) {
6
7 return a*a + b;
8}
9
10int main() {
11 fnptr;
12 double x,y,z;
13
14 x=4;
15 y=0.1;
16
17 fn = &foo;
18
19 z = fn(x,y);
20
21 printf("%lf\n",z);
22 return 0;
23}
Line 3 defines a new variable case that is a function pointer that returns a double and accepts 2 doubles as arguments. We then define a function called foo that matches the requirements for fnptr. In the main routine, we define a new variable called fn and assign the address of foo to it. We then call the variable fn, which is a pointer to foo, and pass the arguments as with a normal function. Compiling and executing this code prints 16.100000 to the screen.
Now let’s turn fn into an array:
1#include <stdio.h>
2#include <stdlib.h>
3
4typedef double (*fnptr)(double,double);
5
6double foo(double a, double b) {
7
8 return a*a + b;
9}
10
11double bar(double a, double b) {
12
13 return a + b*b;
14}
15
16int main() {
17 fnptr *fn;
18 double x,y,z;
19
20 x=4;
21 y=0.1;
22
23 fn = malloc(2*sizeof(fnptr));
24
25 fn[0] = &foo;
26 fn[1] = &bar;
27
28 z = fn[0](x,y);
29 printf("%lf\n",z);
30
31 z = fn[1](x,y);
32 printf("%lf\n",z);
33
34 return 0;
35}
Executing this code will print 16.100000 and 4.010000 to the screen on two consecutive lines. This framework can be extended to multiple dimensions, but we won’t show that here. For VPLanet, the fnUpdate variable is 3 dimensions: one for the bodies, one for their primary variables, and one for the processes. In other words fn[1][2][3] is the function that returns the derivative of the 2nd body’s third derivative’s 4th process, which in the cases of a DistOrb run of Solar System could be the contribution of Mars to the eccentricity evolution of Venus.
While this functionality is extremely powerful, it does come with pitfalls, especially when debugging. Misassigning functions or inadvertently overwriting memory can be extremely difficult to catch with print statements. For this reason we strongly recommend using a debugger, such as gdb or lldb, when developing VPLanet. In particular, we have found the watchpoint feature of these utilities to be invaluable as the debugger will catch when a function pointer element is overwritten. The function pointer matrices are also a primary motivating factor in employing advanced software tools like valgrind and address-sanitizer, which monitor memory calls for use of unitialized memory, memory writes that are out of bounds (writing to memory beyond that which was allocated to a variable), etc.